
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
L2-1963
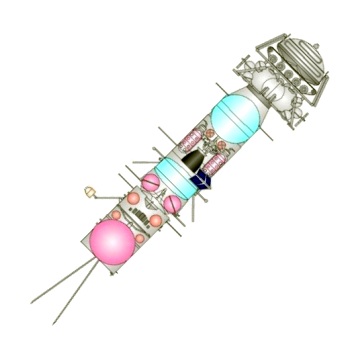 L2-1963 1963 L2 robot lunar rover spacecraft. L2 configuration speculative based on early Ye-8 rover design studies at OKB-1. |
AKA: L2;L2-9K-11K-13K. Status: Study 1963. Gross mass: 23,000 kg (50,000 lb).
It would use the same rocket stage and tanker elements developed for the L1 manned circumlunar project. It can be seen to be the direct ancestor of the Ye-8 Lunokhod landers of the 1970's.
The objective of the L-2 would be to conduct scientific research on the lunar surface and to allow selection of a favorable landing point for later manned flights. A television system would send back panoramic television pictures.
The rover would be nuclear-powered and equipped with a radio beacon for later manned expeditions to home on for precision landings. It would also investigate:
- The relief of the lunar surface
- The mechanical properties of the lunar soil
- The microscopic structure of the surface
- The magnetic fields of the moon
- Cosmic ray flux
- Solar insolation at the surface
The L-2 system consisted of:
- The L-2 crawler. This had a maximum speed of 4 km/hour and a range of 2,500 km. The L-2 consisted of:
- Motor compartment with equipment permitting speeds of up to 4 km/hour
- Equipment compartment, with on-board radio, navigation, and control systems
- Power generating system (evidently solar and/or radioisotope generators)
- The 13K rocket system for midcourse corrections and lunar braking. This would brake the L-2 to a direct landing on the surface of the moon with no intermediate lunar orbit. It consisted:
- Braking stage, for midcourse corrections and the main braking impulse for the landing on the surface. This would ignite at an altitude of 200-300 km above the surface.
- The landing vehicle, with throttled engines, for the soft landing on the surface at a speed of only 2 to 4 m/s.
- The guidance system
- The maneuvering and guidance system for docking with the 9K in earth orbit, which was cast off before the translunar injection.
- The 9K translunar injection stage for sending the L-2 towards the moon from the low earth assembly orbit. This was the Soyuz B rocket stage used on the L-1 project
Total mass of the L-2 + 13K + 9K complex at ignition of the 9K for translunar injection was 23,000 kg. Total mass of the L-2 and 13K in their translunar cruise configuration was 5,000 kg. As was the case for the L-1, six launches of the Soyuz 11A511 booster would be required to assemble the L-2 in a 225 km low earth assembly orbit.
Family: Moon. Country: Russia. Launch Vehicles: R-7. Agency: Korolev bureau. Bibliography: 283.
1963 September 23 - .
- Korolev letter sets out a space exploration plan for 1965 to 1975. - . Nation: Russia. Spacecraft: L2-1963, L3-1963, L4-1963, L5, Soyuz A, Soyuz B, Soyuz V. The plan included a series of lunar exploration vehicles: the L1, L2, L3, L4, and L5..
Back to top of page
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
© 1997-2019 Mark Wade - Contact
© / Conditions for Use