
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
Lunar Worm
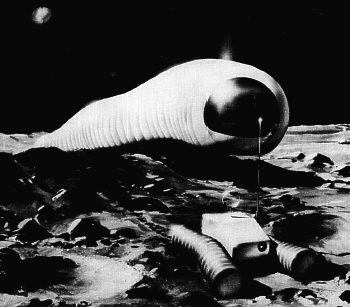 Lunar Worm Credit: NASA |
Status: Study 1966. Payload: 450 kg (990 lb). Gross mass: 1,360 kg (2,990 lb). Height: 10.77 m (35.33 ft). Diameter: 2.74 m (8.98 ft).
This was a bellows-concept mobile vehicle which could 'inch' its way across almost any kind of lunar surface. Design studies were made of the concept as applied to a small unmanned vehicle, a supply vehicle, a small lunar shelter, and a large lunar shelter.
Excerpts from
FEASIBILITY STUDY FOR LUNAR WORM PLANETARY ROVING VEHICLE CONCEPT
Prepared under Contract No. NAS 1-5709 - MAY 1966
By. F. A. Dobson and D. G. Fulton
Aeronutronic, Division of Philco Corporation
SUMMARY
A feasibility study has been carried out of various concepts of using a bellows to provide cross country mobility, particularly on the moon. Effort was directed primarily toward analytical treatment of bellows mobility and of bellows structure including both corrugated and membrane bellows, and applying the results to several brief design studies of typical missions. All concepts studied can have all moving parts internally located in a protected, pressurized environment and can be considerably foreshortened during delivery.
The concept wherein the bottom surface of the vehicle moves in the form of a traveling wave similar to the motion used by snakes and centipedes appears to be potentially the most versatile. As compared with current cross country vehicles, it is capable of moderate to high speeds over rough terrain with a smoother ride and less vehicle bounce, good maneuverability, good propulsive efficiency, better ability to climb obstacles and to bridge crevices. It can be designed with a very low footprint pressure for use over a wide variety of surfaces including even fluid-like soils through which it is capable of swimming.
The double-acting bellows concept, which is a variation of rib-walking, where adjacent ribs contacting the surface are 180 deg out of phase, appears quite suitable for unmanned vehicles with regard to simplicity, ease of deployment, weight and power requirements but the ride tends to be rough and ability to clear obstacles is somewhat limited, A version of this concept can be designed which is within the present state-of-the-art of metal bellows technology,
The extension-contraction bellows concept, wherein the vehicle alternately shortens and lengthens and propulsion is derived from asymmetry built into the lower surface, is the simplest concept considered but also requires the most power because of friction in sliding over the terrain. It is restricted in footprint loading and maneuverability but is uniquely suited for incorporation of a novel solar-mechanical energy transfer system which holds some promise as a lightweight, inexpensive means for supplying mechanical energy for propulsion.
The study also includes fundamental analytical treatment of a stepped surface planing over soil, of wave motions which might be used by a variety of vehicles and of the structure of membrane bellows. A lunar soil model suitable for short stroke and cyclic motion studies was developed.
MANNED EXTENDED-RANGE ROVING VEHICLE
Configuration Requirements
This section contains a preliminary design study of an extended range roving vehicle suitable for use by two men to carry out traverses of the lunar surface or perhaps to transport supplies. It utilizes the traveling wave mode with a membrane bellows structure. The vehicle is flexible and steerable both horizontally and vertically and can be collapsed for shipment or storage. It produces a smooth, constant-velocity motion, and appears capable of high speed. The configuration requirements selected for it are as follows:
Total mass 3000 lbm
Useful load 1000 lbm
Average speed 5 mph
Minimum range 100 miles
Minimum life 6 months
Power Requirement 1.23 kW in motion
Diameter of crew cabin 6 to 10 feet
Length of crew cabin 10 feet
The vehicle is made up of two coaxial bellows of which the inner one is pressurized to a living atmosphere, such as 5 psi, and forms the main structure of the vehicle. This inner bellows is reinforced by frames which determine its shape and support the payload and equipment. Also, each frame carries a transverse shaft with a crank on each end. These cranks are driven in synchronism and fixed phase relationship by a power transmission system, and each crank carries with it an outer frame to which is attached the outer bellows.
The outer bellows is of flexible material and is pressurized to a comparatively low pressure. The movement of the outer frames causes this bellows to deform in a manner which supports and propels the vehicle. Since the main structural member is a bellows, it has some flexibility and can be warped horizontally or vertically by cables running along the sides as in the Aeronutronic BOA model.
A traveling wave bellows design concept utilizing membrane construction appears quite attractive for a manned extended-range roving vehicle. Both structural weight and power requirements are considered quite low. The vehicle tends to mold itself to the terrain with a very low footprint pressure which should permit travel: (1) over a spiny type surface (such as a bed of nails), (2) over and through very soft soils, and (3) over rough terrain without vehicle lift-off and bounce under low gravity conditions. Its feasibility is dependent upon the availability of a suitable membrane covering material. This cover must withstand the lunar environment while still remaining flexible and abrasion resistant. The concept produces a smooth, constant-velocity motion and appears capable of moderate to high speed and efficiency as well as great versatility.
SMALL UNMANNED VEHICLE
This section contains a preliminary design study of a small unmanned exploration vehicle utilizing the double-acting bellows concept, employing a circular convoluted stainless steel bellows.
Configuration Requirements
The following design requirements for the vehicle have been selected:
Useful load, including power plant 100 lbm
Average speed 1 mph
Total range 10 miles
Total life 15 days
Diameter 3 feet
Bellows working length 9 feet
Possible Configurations
The double-acting bellows principle selected for the small manned vehicle study can be utilized in a variety of configurations. The version shown in the illustration is an arrangement for achieving roll stability. Here, two circular bellows are used side-by-side. This is probably the simplest way to create a small vehicle, since standard components could be used. The lower surface of the bellows would require protection, and, because of the possibility of high local loads, the concept probably would be applicable only to small vehicles. Subject to this limitation, the concept appears to be quite practicable.
Crew Size: 2. Habitable Volume: 7.00 m3. Electric System: 1.23 kWh.
Family: Lunar Rovers, Moon. Country: USA. Agency: Aeronutronics. Bibliography: 16, 4441.
 | Lunar Worm Credit: NASA |
1966 April 18 - .
- Lunar Worm Planetary Roving Vehicle - .
Nation: USA.
Related Persons: Shea.
Program: Apollo.
Spacecraft: Lunar Worm.
ASPO Manager Joseph F. Shea and members of his organization were invited to attend the formal presentation by the Aeronutronic Division of Philco Corp. on a "Study of Lunar Worm Planetary Roving Vehicle Concept," at LaRC on May 3. The exploratory study to determine the feasibility of a bellows-concept mobile vehicle included a mobility and traction analysis for several kinds of bellows motion and several soil surfaces; analysis of both metallic and nonmetallic construction to provide the bellows structure; brief design studies of the concept as applied to a small unmanned vehicle, a supply vehicle, a small lunar shelter, a large lunar shelter; and an overall evaluation of the suitability of the concept for carrying out various missions as compared with other vehicles.
Back to top of page
Home - Search - Browse - Alphabetic Index: 0- 1- 2- 3- 4- 5- 6- 7- 8- 9
A- B- C- D- E- F- G- H- I- J- K- L- M- N- O- P- Q- R- S- T- U- V- W- X- Y- Z
© 1997-2019 Mark Wade - Contact
© / Conditions for Use